1. Característiques tècniques deMotor Evtol
In elèctric distribuïtPropulsió, els motors condueixen diverses hélices o ventiladors a les ales o al fuselatge per formar un sistema de propulsió que proporciona empenta a l’aeronau. La densitat d’energia del motor afecta directament la capacitat de càrrega útil de l’aeronau. La capacitat de sortida de potència, la fiabilitat i l’adaptabilitat ambiental del motor són factors importants per determinar les característiques dinàmiques i la seguretat dels avions propulsats elèctrics. La selecció de vehicles elèctrics, drons i motors EVTOL és diferent a causa de diferents costos, escenaris d'aplicacions i altres motius [1].

(Font de la foto: lloc web oficial de xarxa/Safran)
1) Vehicles elèctrics: Imant més permanentMotors síncrons,Els motors d’imants permanents amb major eficiència i un parell més elevat poden proporcionar una millor experiència de conducció. Al mateix temps, l’elevada densitat de potència de motors d’imant permanent també pot ajudar els vehicles elèctrics a obtenir una potència més alta sota el mateix volum.
(2) UAV: utilitzat habitualment sense escombretesMotor DC.El motor DC sense escombrat té un baix pes i soroll, i el cost de manteniment és baix, adequat per als requisits de vol dels UAVs; En segon lloc, la velocitat del motor DC sense escombretes és més elevada, adequada per a les necessitats de vol d’alta velocitat dels drons. Per exemple, DJI utilitza motors sense escombretes.
(3) EVTOL: Requisits més elevats per a l'eficiència del motor i la densitat de parell, el motor síncron de l'imant permanent és una solució molt prometedora per al sistema de potència de propulsió elèctrica, perquè el motor d'imant permanent de flux axial té una elevada taxa d'utilització d'espai radial i la densitat de potència i la densitat de parell tenen avantatges en el cas de la proporció de diàmetre de petita longitud. Els avions VTOL elèctrics actuals, com Joby S4 i Archer Midnight, tots adopten motors permanents de síncron d’imants [1].
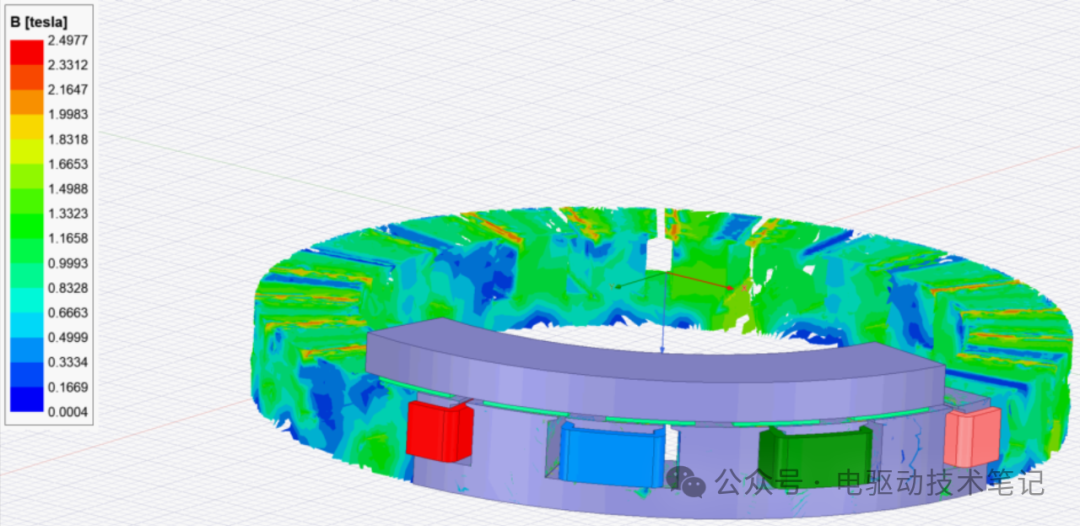
La figura següent mostra la imatge del núvol de la intensitat de la inducció magnètica del rotor fix del motor de flux axial d'un sol rotor d'un sol estador
La xifra següent és una comparació dels paràmetres del motor d'avions elèctrics i de vehicles elèctrics

2. Tendència del desenvolupament del motor Evtol
Actualment, la principal tendència de desenvolupament del sistema d’energia EVTOL és reduir el pes de l’estructura del motor i el pes auxiliar del sistema de refrigeració millorant la tecnologia de disseny electromagnètic, la tecnologia de gestió tèrmica i la tecnologia lleugera i millora constantment la densitat d’energia del motor i la capacitat de potència d’una àmplia gamma de condicions variables. Segons la “investigació i desenvolupament de cotxes voladors i tecnologies clau”, el motor de propulsió de l’aviació ha estat capaç de fer la densitat de potència nominal del cos motor més de 5kW/kg mitjançant materials d’aïllament amb límits de temperatura més alts, materials d’imants permanents amb una densitat d’energia magnètica més elevada i materials estructurals més clars. En millorar el disseny de l’estructura electromagnètica del motor, com l’ús de la matriu magnètica de Halbach, sense estructura del nucli de ferro, bobinatge de filferro i altres tecnologies, a més de millorar el disseny de la dissipació de calor del motor, s’espera que la densitat de potència nominal del cos del motor pugui arribar a 10kW/kg el 2030 i la reducció de la potència de potència superi els 13 kW/kg en 2035 [1] [1].

3. Comparació de les rutes elèctriques i híbrides pures
En comparació amb la ruta elèctrica pura i la ruta híbrida, a partir de la selecció actual de fabricants rellevants, el projecte EVTOL domèstic es basa principalment en l’esquema elèctric pur, limitat per la densitat d’energia de les bateries d’ions de liti i l’EVTOL de baixa capacitat de passatgers és la millor escena de desembarcament de la tecnologia de propulsió elèctrica pura. A l'estranger, alguns fabricants han exposat el pla híbrid amb antelació i han pres el lideratge en diverses rondes de proves i iteracions. Com es pot veure a la taula següent, l’esquema híbrid és, òbviament, més fort en l’angle de resistència i pot aconseguir més aplicacions en l’escenari de la distància mitjana i a la baixa altitud en el futur [1].
Posat Post: 27 de febrer de 2015